Classes of Graphs
Prepared by:
Joseph Malkevitch
Department of Mathematics
York College (CUNY)
Jamaica, New York 11451
email:
malkevitch@york.cuny.edu
web page:
http://york.cuny.edu/~malk/
There are a variety of reasons for calling attention to classes or families of graphs. These reasons include:
a. There are easy operations which make it possible to generate all the graphs in the class.
b. The graphs have interesting properties (e.g. they always have hamiltonian circuits; they always admit spanning trees without two-valent vertices, etc.)
c. The graphs arise in applications in a natural way (e.g. interval graphs)
d. The graphs have "extremal" properties
e. The graphs represent objects of importance in other branches of mathematics (e.g. polytopal graphs)
f. It is possible to prove interesting theorems about the graphs.
What follows is a list of different collections of important classes of graphs, examples of such graphs, and indications why the classes of graphs are natural to single out for study. Some of these classes are subclasses of other classes mentioned. For example, trees, complete bipartite graphs, and cubes are all subclasses of bipartite graphs, but sometimes the category is sufficiently important in its own right that it is listed separately. Non-degeneracy conditions are sometimes not specifically mentioned. Questions that may be of interest to understand the ideas involved are sprinkled throughout the discussion. Usually the graphs are taken to be simple, that is they have no loops or multiple edges.
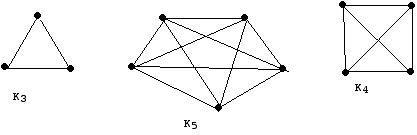
I. Complete Graphs
A graph is complete if each vertex is joined to every other vertex with an edge.
The standard notation for these graphs is Kn.
Question 1:
How many edges are there in the complete graph with n vertices?
Question 2:
Does every complete graph have a hamiltonian circuit?
II. Bipartite Graphs
A graph is bipartite if its vertices can be divided into two sets A and B such that any edge in the graph has one end in set A and the other in set B.

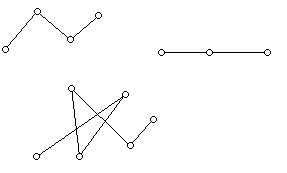
III. Paths
A path is a connected graph with at least two vertices where each vertex has valence either 1 or 2.
Paths of length 2, 3, and 5 are shown below:
Question 3:
Are paths bipartite graphs?
Question: 4 Can you write edges of a 3-cube as a disjoint union of paths of length a. 2 b. 3 c. 4 d. 6?
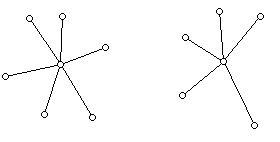
IV. Stars
A star is a graph formed by a vertex v being joined to a set of k other points.
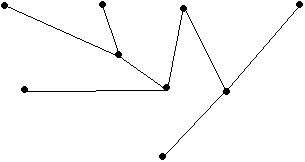
V. Trees
A tree is a connected graph which has no circuits.

Paths and stars are special kinds of trees. Another interesting class of trees are those whose vertices are 1-valent or k-valent. Such a tree can be denoted as a (1,k)-tree.
Question 5:
If a (1,3)-tree has m 3-valent vertices, how many vertices does the tree have?
Question 6:
Do (1,k)-trees exist with m k-valent vertices for every m which is at least 2?
Question 7:
Do (1,k)-trees exist for every number of vertices m, where m is at least 4?
VI. d-cubes
The d-cubes a graphs where the vertices can be labeled with the binary sequences of length d where two vertices are adjacent if and only if the binary sequences differ in one position.
Note: a (d+1) cube can be constructed from two copies of a d-cube by joining corresponding vertices.
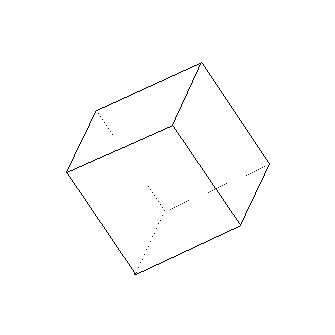
A drawing of a 3-cube for which it is not easy to tell that it is the 3-cube:
A 3-cube with hidden lines:
A variety of drawings of the 3-cube:
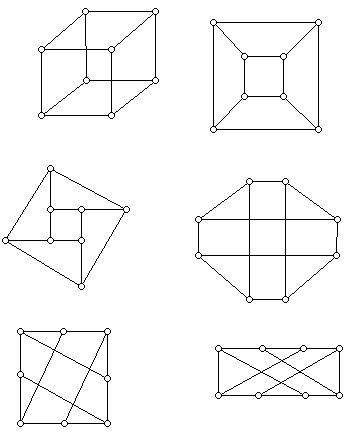
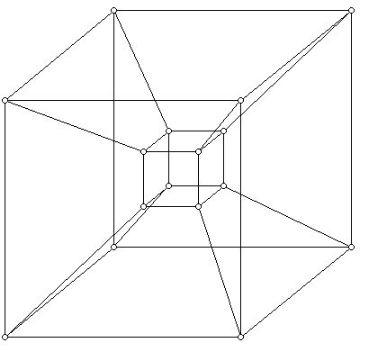
4-cube:
Question 8:
Verify that ever d-cube (d at least 2) has a hamiltonian circuit.
Question 9:
Find formulas as a function of d for the number of vertices and edges of a d-cube.
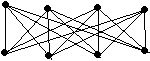
VII. Complete Bipartite Graphs
A bipartite graph G is called complete if each vertex in the set A of the bipartition is joined to each vertex in B (and, hence, each vertex in B is joined to each vertex in A).

If the sets A and B have m and n vertices,respectively, then we denote the resulting graph: Km,n.
Question 10:
For which values of m and n (if any) does Km,n have a hamiltonian circuit?
Question 11:
For which values of m and n (if any) does Km,n have a hamiltonian path?
Question 12:
For which values of m and n (if any) does Km,n have an Eulerian circuit?
Question 13:
For which values of m and n (if any) does Km,n have an (open) Eulerian trail?
VIII. Regular graphs
A graph is called regular or k-valent if every vertex of the graph is k-valent.
The d-cubes are regular graphs as are the complete graphs.
IX: Planar and plane graphs
A graph is plane if it can be drawn in a plane so that its edges meet only at vertices.
Note: Plane graphs divide up the plane into regions called faces. (In the case that the graph is a tree there is only one such region). Every plane graph has one special region that it divides the plane into that is unbounded, sometimes referred to as the "infinite" face.
A graph is planar if it is isomorphic to a plane graph.
The graphs below are planar but not plane:
The following graph is plane but not regular:

There are many interesting special kinds of planar (plane) graphs:
i. Outerplanar graphs
Graphs which can be embedded in the plane so that all their vertices lie on the infinite face are called outerplanar. A special class of outer planar graphs are the triangulated polygons. These are outerplanar graphs which are formed by adding diagonals to a simple closed polygon so that all the bounded faces are triangles.
Question 14:
Show that any triangulated polygon has at least two vertices of valence 2.
ii. n-prisms
Two n-gons with corresponding vertices joined by an edge is called a prism.
iii. n-anti-prisms
Two n-gons with a band of 2n triangles connecting them up is called an anti-prism.
iv. n-pyramids
An n-gon with each of its vertices joined to another vertex is called a n-pyramid. Another name for this class of graphs is wheels.
v. n-bipyramids
Two n-pyramids joined along their n-gons for a bipyramid.
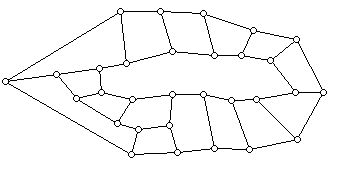
vi. n-pentaprisms
Two n-gons joined with a band of 2n pentagons form an n-pentaprism.

Question 15:
Do all the n-pentaprism have hamiltonian circuits?
vii. trees
viii. Halin graphs
A Halin graph (named for the German mathematician Rolf Halin) results when a tree with no vertices of valence 2 has a circuit passed through the tree's 1-valent vertices. Halin graphs built on trees where all the vertices (other than the 1-valent ones) have the same valence are of particular interest. (This last type of Halin graph is built on the (1, k)-trees when k is at least 3).
Question 16:
Do Halin graphs always have hamiltonian circuits?
Question 17:
Can you find a Halin graph formed from a (1,3)-tree that does not have circuits of length from 3 up to the number of vertices of the graph?
ix. 3-polytopal graphs (see X below).
x. Maximal planar graphs (simplicial graphs)
Maximal planar graphs are planar graph with at least 4 vertices where when the graph is embedded as a plane graph every face of which is a triangle. They are maximal planar because no additional edges can be added and still have a planar graph.
Question 18:
Does every maximal planar graph always have a hamiltonian circuit?
Question 19 (not easy):
Does every maximal planar graph always admit a spanning tree which has no 2-valent vertices?
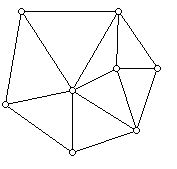
xi. Near triangulations
A plane graph G (with at least 4 vertices) is a near triangulation if all its faces except for perhaps the infinite face are triangles.
The graph below is a near triangulation. Additional examples are also the triangulated polygons.
Question 20 (not easy):
Does every near triangulation have a spanning tree which has no 2-valent vertices.
X: Polytopal Graphs
A graph is called d-polytopal if it is isomorphic to the edge-vertex graph of some d-dimensional polytope. (A d-polytope is the convex hull of a finite collection of points that do not lie in a (d-1)-hyperplane. The convex hull of a set X is the intersection of all convex sets which contain X.)
Branko Grünbaum and Theodore Motzkin's graph theoretical reformulation of a theorem of Ernst Steinitz states:
A graph G is 3-polytopal if and only G is planar and 3-connected.
3-connected means that for any vertices p and q in the graph there are at least 3 paths joining p and q which have only p and q in common.
The complete graphs with d vertices, d at least 4, are d-polytopal. Rather surprisingly, for d at least 5, there are d-polytopes whose graphs are complete graphs with d vertices, but which are not isomorphic to each other!
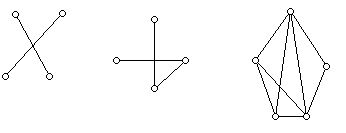
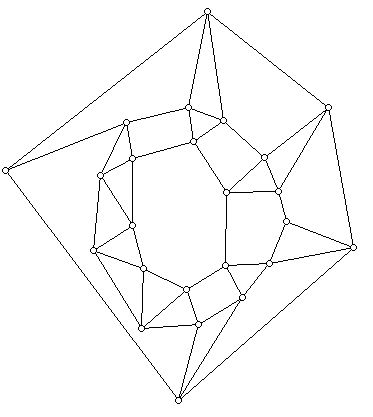
Examples of 3-valent, 4-valent, and 5-valent 3-polytopal graphs are shown below:

XI. Intersection graphs
Intersection graphs are graphs which arise in the following way. A collection of objects with a particular property P is defined and each of these objects is represented by a vertex. Two of the vertices are joined by an edge if the objects they represent (having property P) have at least one point in common.
Examples of Property P:
a. Open intervals on a line
b. Closed intervals on a line
c. Open unit intervals on a line
d. Boxes in d dimensions
e. Circles in the plane
f. Unit circles in the plane
g. Line segments in the plane
h. Convex sets in the plane
i. Paths in a tree
j. Paths of length k in a tree
Question 21:
Find the intersection graph for the 8 segments shown in the diagram below:

XII. Graphs with genus g
A graph G is said to have genus g if it can be embedded on a surface of genus g but not on a surface of smaller genus.
The graphs K5 and K3,3 are not planar but are of genus 1.
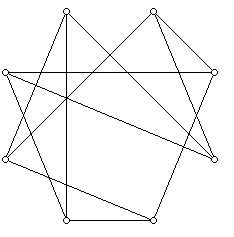
XIII. Crossing number r.
A graph is said to have crossing number r if it can be embedded in the plane with r crossings but there is no embedding in the plane with fewer than r crossings.
In recent years a variety of other crossing number questions have been posed and there are crossing number questions for surfaces other than the plane. For example, in computing the crossing number for a graph in the plane one can allow edges to be restricted to straight line segments. The crossing number that one gets in this case is known as the rectilinear crossing number of the graph.
Question 22:
Determine the crossing number for the graphs K5 and K3,3?
XIV. Visibility graphs
These are graphs with vertex set X, which arise from letting X be a collection of points (perhaps a subset of some other larger set Y). Join two elements v and w of X with an edge when they "mutually visible," that is, they are joinable by a straight line segment which includes no other point of X or Y. X can be:
a. Vertices of a plane polygon.
b. A finite collection of line segments.
c. Vertices of a polygon in 3-dimensional space.
d. A finite collection of line segments in 3-dimensional space.
Question 23:
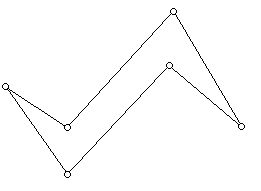
Draw the visibility graph of the vertices of the simple polygon below:
Question 24:
Draw the visibility graph of the points which are endpoints of the segments for the diagram in Question 21. Note that the two ends of a specific segment in this diagram are not visible from one another. (This graph will have sixteen vertices.)
There are many other classes of graphs that might be considered, and in fact at least one book is devoted to "Graph Classes."
XV: Geometric Graphs
A graph is called geometric if consists of a set of points in the plane, no three collinear, where the edges are straight line segments.
One can ask a question such as, when an abstractly defined graph is drawn in the plane as a geometric graph, can it be done in such a manner that it will always have a spanning tree whose edges do not cross each other?
Problems
The classes of graphs defined above provide an entry point to a collection of research investigations. (Many of these problems have already solved but are fun to contemplate none the less.)
By looking at various graph properties and invariants one can ask for the classes of graphs above, which graphs in the class have the property and which do not and what is the value of the various invariants for members of the class. One can also try to see which graphs in a particular class have a particular property. For example, while complete bipartite graphs do have always have hamiltonian circuits, which ones do?
Properties and invariants to consider include:
Properties:
1. Have an Eulerian circuit; have an open Eulerian trail.
2. Have a hamiltonian circuit have a hamiltonian path.
3. Are outerplanar; are planar.
4. Are k-polytopal for some k.
5. Are intersection graphs (for some choice of objects)
6. Are visibility graphs (for some set of points)
7. Have a spanning tree of maximal valence k.
8. Have a spanning tree with no 2-valent vertex.
9. Have a perfect matching.
10. Have two edge disjoint hamiltonian circuits
11. Has a line graph with specified properties
Invariants:
1. girth (length of the shortest circuit in the graph)
2. radius (the minimum eccentricity of the vertices in the graph)
3. diameter (the maximum distance between any pair of vertices in the graph)
4. independence number
5. i. vertex connectivity ii. edge connectivity
6. genus
7. crossing number; rectilinear crossing number
8. domination number
9. vertex covering number
10. edge covering number
11. i. vertex coloring number ii. edge coloring number
Reference:
Brandstädt, A. and V. Le, J. Spinrad, Graph Classes, SIAM, Philadelphia, 1999.